Sveiserobotserie



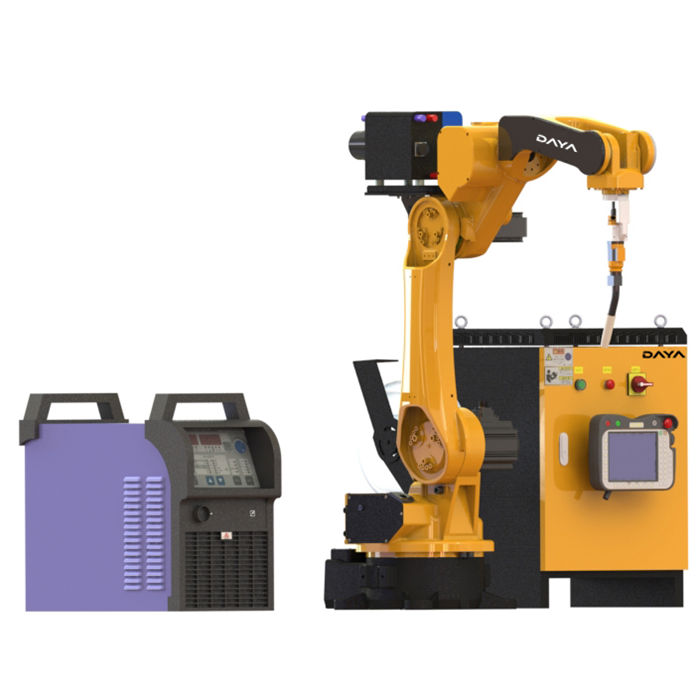
Sveiserobot

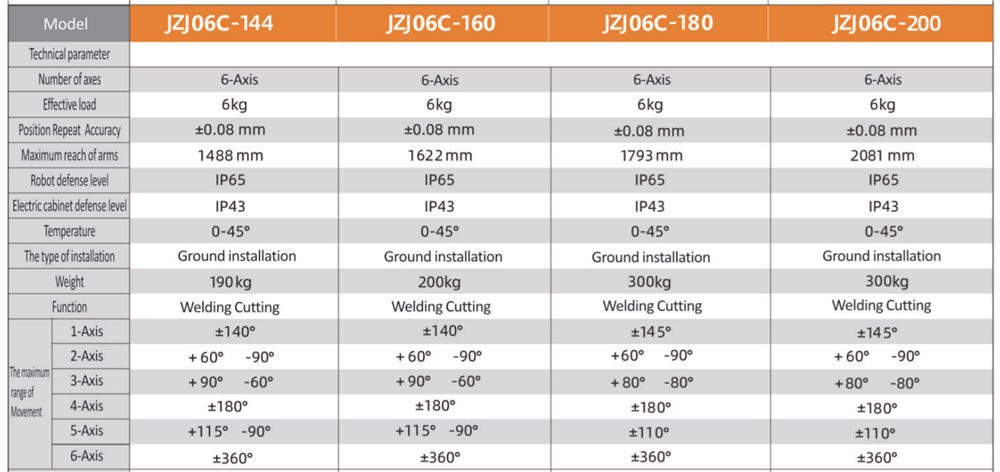
Sveiserobotserie JZJ06C-180
Sveiserobotserie JZJ06C-144

Sveiserobotserie JZJ06C-160

Sveiserobotserie JZJ06C-200
Kort introduksjon
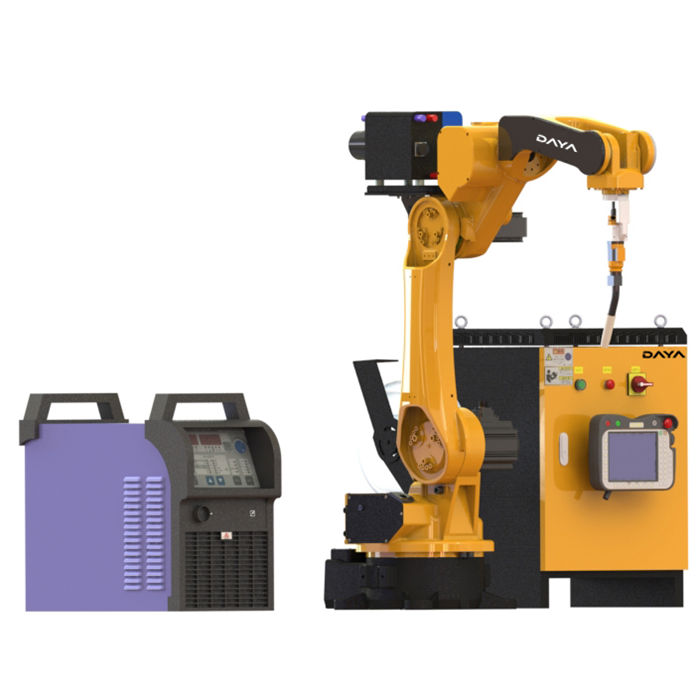
Sveiserobot er en industrirobot som driver sveising (inkludert skjæring og sprøyting). I henhold til definisjonen av internasjonal organisasjon for standardisering (ISO) at industrirobot tilhører standard sveiserobot, er industrirobot en flerfunksjonell, repeterbar programmerbar manipulator med tre eller flere programmerbare akser, som brukes innen industriell automatisering. For å tilpasse seg forskjellige applikasjoner, er det mekaniske grensesnittet til robotens siste akse vanligvis en tilkoblingsflens, som kan kobles til med forskjellige verktøy eller endeffektorer. Sveiserobot er å installere sveisetang eller sveise (skjære) pistol på endeakselflensen til industriell robot, slik at den kan utføre sveising, skjæring eller termisk sprøyting.
Robotsveising er bruk av mekaniserte programmerbare verktøy (roboter), som automatiserer en sveiseprosess fullstendig ved å utføre sveisen og håndtere delen. Prosesser som gassmetallbuesveising, selv om de ofte er automatisert, tilsvarer ikke nødvendigvis robotsveising, siden en menneskelig operatør noen ganger forbereder materialene som skal sveises. Robotsveising brukes ofte til motstandssveising og buesveising i høyproduksjonsapplikasjoner, som for eksempel bilindustrien.
Robotsveising er en relativt ny anvendelse av robotikk, selv om roboter først ble introdusert i USAs industri i løpet av 1960-tallet. Bruken av roboter i sveisingen startet ikke før på 1980-tallet, da bilindustrien begynte å bruke roboter i stor grad til punktsveising. Siden da har både antall roboter som brukes i industrien og antall applikasjoner deres vokst sterkt. I 2005 var mer enn 120 000 roboter i bruk i den nordamerikanske industrien, omtrent halvparten av dem for sveising. [1] Veksten er hovedsakelig begrenset av høye utstyrskostnader, og den resulterende begrensningen for høyproduksjonsapplikasjoner.
Robotbuesveising har nylig begynt å vokse raskt, og allerede kommanderer den rundt 20% av industrielle robotapplikasjoner. De viktigste komponentene i buesveisroboter er manipulatoren eller den mekaniske enheten og kontrolleren, som fungerer som robotens "hjerne". Manipulatoren er det som får roboten til å bevege seg, og utformingen av disse systemene kan kategoriseres i flere vanlige typer, som SCARA og kartesisk koordinatrobot, som bruker forskjellige koordinatsystemer for å rette maskinens armer.
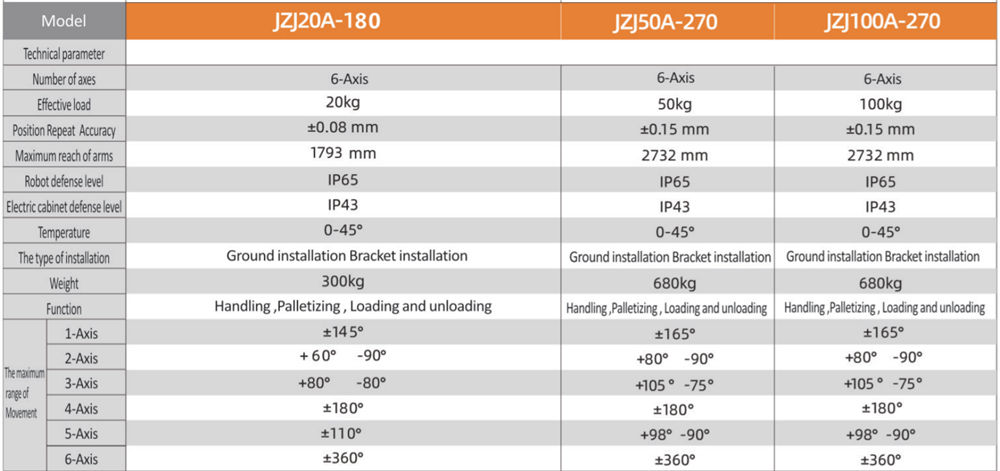
Welding Robot Series tekniske parametere